#видео | На борту МКС прошли первые летные испытания робота-пчелы «Bumble»

Отправленные 17 апреля этого года на борт Международной космической станции компактные летающие роботы-кубы проекта Astrobee начали проходить свое летные испытания в условиях микрогравитации. Как сообщает аэрокосмическое агентство NASA, дебютный полет робота «Bumble» в невесомости состоялся 14 июня 2019 года. Агентство напоминает, что на борту также находится второй робот по имени «Honey», а прибытие на МКС третьего, «Queen» ожидается в июле этого года.
Основная задача этой системы из комплекса роботов будет заключаться в проверке их возможностей работы на борту МКС, но в перспективе NASA рассматривает возможность использования подобных роботов при выполнении ежедневных рутинных задач, что позволит освободить экипаж МКС от простых, но частых действий. Кроме того, такие машины могут очень пригодиться при миссиях в дальний космос – Луну и Марс. Отсюда, к слову, и название проекта Astrobee – «Астропчелы».

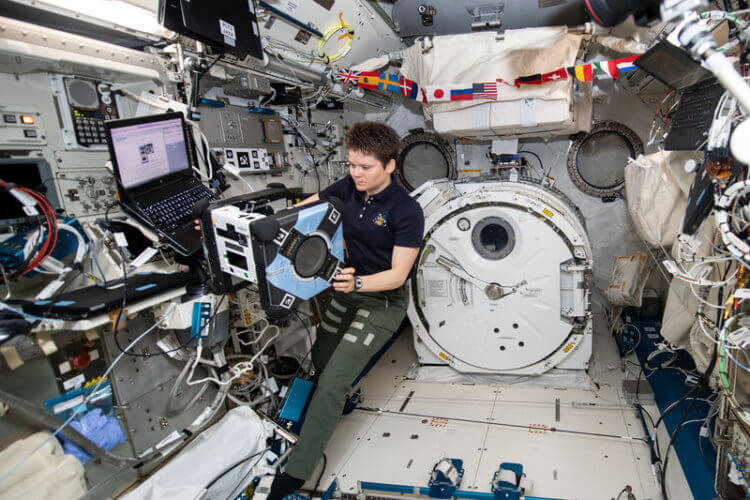
30 апреля 2019 года Энн МакКлейн астронавт NASA распаковала ящик с роботом «Bumble» и при поддержке команды разработчиков NASA проекта Astrobee, провела проверку всех вспомогательных системы робота – авионики, видеокамер, пропульсивной системы, а также передачу данных и зарядку его батарей.


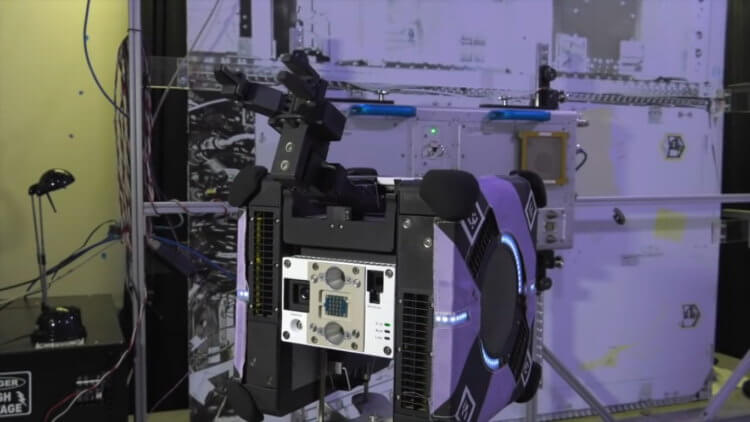
В середине июня в условиях микрогравитации на борту Международной космической прошли первые летные испытания робота «Bumble». Видео можно посмотреть ниже.

Технические особенности роботов проекта Astrobee

Разработали роботов специалисты Исследовательского центра Эймса NASA. Технические характеристики компактных роботов помощников следующие:
- Размер каждого робота составляет 30х30х30 сантиметров;
- Внешняя обшивка корпуса покрыта мягким материалом. Он минимизирует возможный ущерб при ударе робота о какой-либо предмет или элемент на борту МКС;
- Роботы весьма многофункциональны. Каждый оснащен системой захвата и фиксации предметов со складывающимся манипулятором, который позволят захватывать и перемещать объекты с одного конца станции в другой. Помимо этого, с помощью этих же фиксаторов роботы способны при необходимости фиксировать свое положение, зацепившись за поручни или другие элементы интерьера станции;
- Для их зарядки на МКС установлена специальная док-станция. Она же служит для анализа полученных телеметрических данных;
- Передвигаться могут только на МКС и только в модулях, где имеется атмосфера, поскольку их движение в невесомости осуществляется благодаря системе вентиляторов (установлены с каждой стороны куба), которые захватывают и выбрасывают воздух через 12 форсунок в противоположном движению направлении. За работу этой системы отвечает внутренний компьютер, установленный на каждого робота;
- В качестве операционной системы используют Linux. Однако модуль, который отвечают задачу по перемещению предметов внутри станции работает на основе Android. Это позволит при необходимости быстро расширить функциональность системы;
- Каждый робот оснащен: основной навигационной камерой с полем зрения 116 градусов, несколькими HD-камерами с автофокусом и возможностью передачи информации на Землю в режиме реального времени, а также системой CamBoard Pico Flexx, которая позволяет машине распознавать предметы и препятствия с расстояния до четырех метров;
- Могут работать как автономно, так и с помощью удаленного управления.

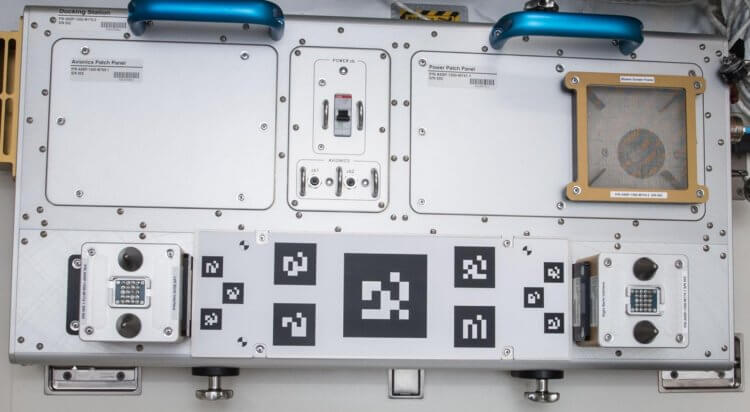
Зарядная станция роботов
Функции и задачи роботов Astrobee

- Помощь экипажу. Выполнение рутинных задач, чтобы экипаж МКС мог сфокусироваться на решении более важных вопросов: проведении экспериментов и различных научных исследований;
- Инвентаризация, документирование экспериментов, мониторинг работы систем МКС, контролирование качества воздуха, перемещение грузов на борту станции;
- Техническое обслуживание модулей МКС, когда в них нет персонала или в местах, куда экипаж не может оперативно добраться;
Обсудить новость можно в нашем Telegram-чате.